spikeRNN: Tutorials#
This notebook provides a complete walkthrough of the spikeRNN framework, from training a rate-based RNN to converting it into a functional spiking RNN for the Go-Nogo Task.
The workflow is divided into four main parts:
Part 1: Training a Rate-based RNN: We’ll train a continuous rate model on the Go-NoGo cognitive task,
Part 2: Saving the Trained Model: The parameters of the trained rate model are saved to a
.matfile for conversion,Part 3: Converting to a Spiking RNN: We’ll use the saved model to construct a leaky integrate-and-fire (LIF) spiking network.,
Part 4: Evaluating the Spiking Network: Finally, we’ll evaluate the performance of the spiking network and visualize its activity.
Part 0: Installation#
Before running the tutorial, we need to install the
spikeRNNpackage.
import sys
# !{sys.executable} -m pip install -e ..
Setup: Imports and Configuration#
import os
import sys
# Add the spikeRNN root directory to Python path
module_path = os.path.abspath(os.path.join('..', '..'))
if module_path not in sys.path:
sys.path.insert(0, module_path)
import numpy as np
import pandas as pd
import torch
import scipy.io as sio
import matplotlib.pyplot as plt
from rate import FR_RNN_dale, set_gpu, create_default_config
from rate import TaskFactory
from rate.model import loss_op
from spiking.LIF_network_fnc import LIF_network_fnc
from spiking.lambda_grid_search import lambda_grid_search
import warnings
warnings.filterwarnings('ignore')
Part 1: Training a Rate-based RNN#
First, we’ll configure and train a rate-based recurrent neural network with Dale’s principle on the Go-NoGo task. The network learns to produce a high output for a ‘Go’ stimulus and maintain a low output for a ‘NoGo’ stimulus (i.e., no stimulus).
# Set up GPU if available, otherwise use CPU
device = set_gpu('0', 0.3)
# Configure network parameters
N = 200 # Number of neurons
P_inh = 0.2 # Proportion of inhibitory neurons
P_rec = 0.2 # Recurrent connection probability
config = create_default_config(N=N, P_inh=P_inh, P_rec=P_rec)
# Initialize network
w_in = torch.randn(200, 1, device=device)
w_out = torch.randn(1, 200, device=device) / 100
net = FR_RNN_dale(
N=config.N,
P_inh=config.P_inh,
P_rec=config.P_rec,
w_in=w_in,
w_out=w_out,
som_N=0, # No SOM neurons for this task
w_dist='gaus',
gain=1.5,
apply_dale=True,
device=device
)
w0 = net.w.clone().detach()
# Set up training parameters
optimizer = torch.optim.Adam(net.parameters(), lr=1e-3)
num_trials = 10000
settings = {
'T': 200,
'stim_on': 50,
'stim_dur': 25,
'DeltaT': 1,
'task': 'go-nogo',
'taus': [10]
}
training_params = {
'learning_rate': 0.01, # learning rate
'loss_threshold': 7, # loss threshold (when to stop training)
'eval_freq': 100, # how often to evaluate task perf
'eval_tr': 100, # number of trials for eval
'eval_amp_threh': 0.7, # amplitude threshold during response window
'activation': 'sigmoid', # activation function
'loss_fn': 'L1', # loss function ('L1' or 'L2')
'P_rec': 0.20
}
losses = []
GoNogoTask = TaskFactory.create_task('go_nogo', settings)
u, target, label = GoNogoTask.simulate_trial()
u_tensor = torch.tensor(u, dtype=torch.float32, device=device)
# Get initial network outputs
stim0, x0, r0, o0, _, w_in0, m0, som_m0, w_out0, b_out0, taus_gaus0 = \
net.forward(u_tensor, settings['taus'], training_params, settings)
print("Starting rate RNN training...")
# Run the training loop
for trial in range(num_trials):
optimizer.zero_grad()
# Generate data via TaskFactory
u, target, label = GoNogoTask.simulate_trial()
u_tensor = torch.tensor(u, dtype=torch.float32, device=device)
# Forward pass
stim, x, r, o, w, w_in, m, som_m, w_out, b_out, taus_gaus = net.forward(u_tensor, settings['taus'], training_params, settings)
# Compute loss
loss = loss_op(o, target, training_params)
# Backward pass and optimization
loss.backward()
optimizer.step()
losses.append(loss.item())
print("Training complete.")
w = net.w.clone().detach()
Starting rate RNN training...
Training complete.
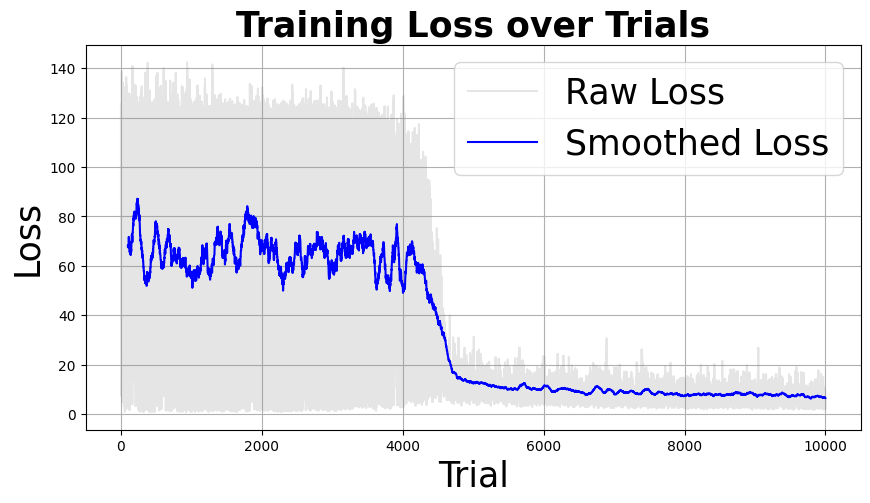
plt.figure(figsize=(10, 5))
window_size = 100 # adjust this value to change smoothing amount
smoothed_losses = pd.Series(losses).rolling(window=window_size).mean()
plt.plot(losses, alpha=0.2, color='gray', label='Raw Loss')
plt.plot(smoothed_losses, color='blue', label='Smoothed Loss')
plt.title('Training Loss over Trials', fontsize=25, fontweight='bold')
plt.xlabel('Trial', fontsize=25)
plt.ylabel('Loss', fontsize=25)
plt.grid(True)
plt.legend(fontsize=25)
plt.show()
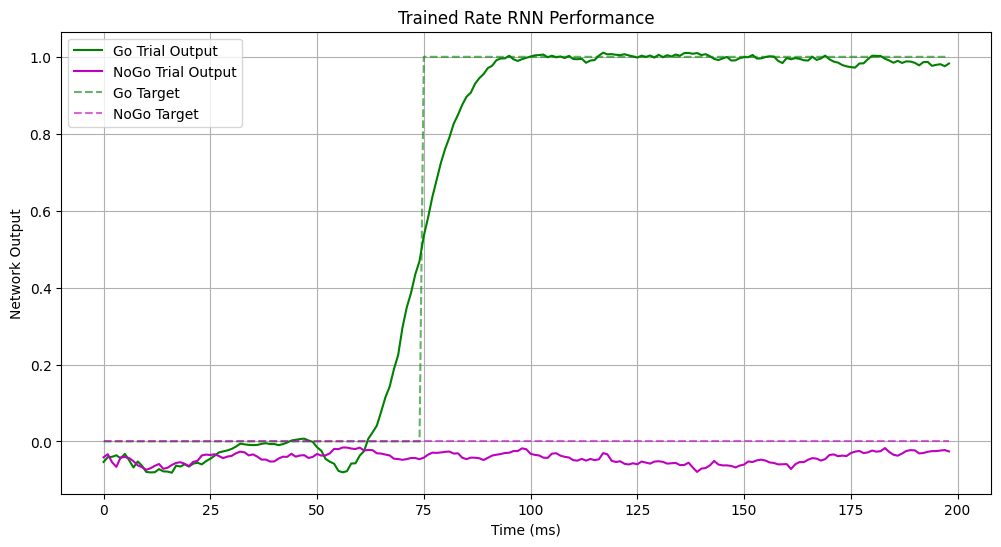
# Test the trained network
net.eval() # Set network to evaluation mode
with torch.no_grad():
# ---------- Go trial ----------
u_go, label_go = GoNogoTask.generate_stimulus('go')
u_go_tensor = torch.tensor(u_go, dtype=torch.float32, device=device)
full_out_go = net.forward(u_go_tensor,
settings['taus'],
training_params,
settings)
go_o_list = full_out_go[3] # list of output tensors
go_out = torch.stack(go_o_list).squeeze().t() # shape (1,T-1)
# ---------- NoGo trial ----------
u_nogo, label_nogo = GoNogoTask.generate_stimulus('nogo')
u_nogo_tensor = torch.tensor(u_nogo, dtype=torch.float32, device=device)
full_out_nogo = net.forward(u_nogo_tensor,
settings['taus'],
training_params,
settings)
nogo_o_list = full_out_nogo[3]
nogo_out = torch.stack(nogo_o_list).squeeze().t()
# Plot results
time_pts = np.arange(settings['T'] - 1) * settings['DeltaT']
plt.figure(figsize=(12, 6))
plt.plot(time_pts, go_out.cpu().numpy().flatten(),
'g', label='Go Trial Output')
plt.plot(time_pts, nogo_out.cpu().numpy().flatten(),
'm', label='NoGo Trial Output')
plt.plot(time_pts,
GoNogoTask.generate_target(label_go),
'g--', alpha=0.6, label='Go Target')
plt.plot(time_pts,
GoNogoTask.generate_target(label_nogo),
'm--', alpha=0.6, label='NoGo Target')
plt.title('Trained Rate RNN Performance')
plt.xlabel('Time (ms)')
plt.ylabel('Network Output')
plt.legend()
plt.grid(True)
plt.show()
Part 2: Saving the Trained Model#
To prepare for conversion to a spiking network, we need to save all the relevant weights and network parameters into a .mat file. The LIF_network_fnc will load this file.
model_filename = 'rate_model_go_nogo.mat'
model_dir = '../models/go-nogo'
os.makedirs(model_dir, exist_ok=True)
model_path = os.path.join(model_dir, model_filename)
model_dict = {
'w': net.w.detach().cpu().numpy(),
'w_in': net.w_in.detach().cpu().numpy(),
'w_out': net.w_out.detach().cpu().numpy(),
'w0': w0.detach().cpu().numpy(),
'N': np.array(net.N),
'm': net.mask.cpu().numpy(),
'som_m': net.som_mask.cpu().numpy(),
'inh': net.inh,
'exc': net.exc,
'taus': np.array(settings['taus']),
'taus_gaus': taus_gaus.detach().cpu().numpy(),
'taus_gaus0': taus_gaus0.detach().cpu().numpy(),
}
sio.savemat(model_path, model_dict)
print(f"Trained rate model saved to: {model_path}")
# Save the trained model
torch.save({
'model_state_dict': net.state_dict(),
'optimizer_state_dict': optimizer.state_dict(),
'settings': settings,
'training_params': training_params,
'losses': losses,
'final_loss': losses[-1],
'trial': num_trials,
}, model_path.replace('.mat', '.pth'))
Trained rate model saved to: ../models/go-nogo/rate_model_go_nogo.mat
Part 3: Converting to a Spiking RNN#
Now we convert the trained rate model into a spiking LIF network. A critical parameter in this conversion is the scaling factor (lambda), which maps the continuous rate values to the input currents of the LIF neurons.
Finding the optimal sacling factor (lambda)#
The performance of the resulting spiking network is highly sensitive to the scaling factor. The
spikeRNNpackage provides a functionlambda_grid_searchto find the optimal value by evaluating performance across a range of factors.
opt_scaling_factor = lambda_grid_search(
model_dir=model_dir,
task_name='go-nogo',
n_trials=50,
scaling_factors=list(np.arange(15, 76, 5)),
task_settings=settings
)
Analyzing rate_model_go_nogo.mat for go-nogo task
Testing scaling factor: 15
Performance for 15: 0.420
Testing scaling factor: 20
Performance for 20: 0.580
Testing scaling factor: 25
Performance for 25: 0.600
Testing scaling factor: 30
Performance for 30: 0.860
Testing scaling factor: 35
Performance for 35: 0.700
Testing scaling factor: 40
Performance for 40: 0.880
Testing scaling factor: 45
Performance for 45: 0.760
Testing scaling factor: 50
Performance for 50: 0.440
Testing scaling factor: 55
Performance for 55: 0.500
Testing scaling factor: 60
Performance for 60: 0.480
Testing scaling factor: 65
Performance for 65: 0.460
Testing scaling factor: 70
Performance for 70: 0.600
Testing scaling factor: 75
Performance for 75: 0.440
Best scaling factor: 40
Saved results.
scaling_factor = opt_scaling_factor
down_sample = 1 # No downsampling
use_initial_weights = False # Use trained weights
print(f"Using scaling factor: {scaling_factor}")
# --- NoGo Trial Simulation ---
u_nogo_sim, _ = GoNogoTask.generate_stimulus(trial_type='nogo')
stims = {'mode': 'none'}
print("Running LIF simulation for NoGo trial...")
W_nogo, REC_nogo, spk_nogo, rs_nogo, all_fr_nogo, out_nogo, params_nogo = LIF_network_fnc(
model_path, scaling_factor, u_nogo_sim, stims, down_sample, use_initial_weights
)
# --- Go Trial Simulation ---
u_go_sim, _ = GoNogoTask.generate_stimulus(trial_type='go')
print("Running LIF simulation for Go trial...")
W_go, REC_go, spk_go, rs_go, all_fr_go, out_go, params_go = LIF_network_fnc(
model_path, scaling_factor, u_go_sim, stims, down_sample, use_initial_weights
)
print("Spiking network simulation complete.")
Using scaling factor: 30
Running LIF simulation for NoGo trial...
Running LIF simulation for Go trial...
Spiking network simulation complete.
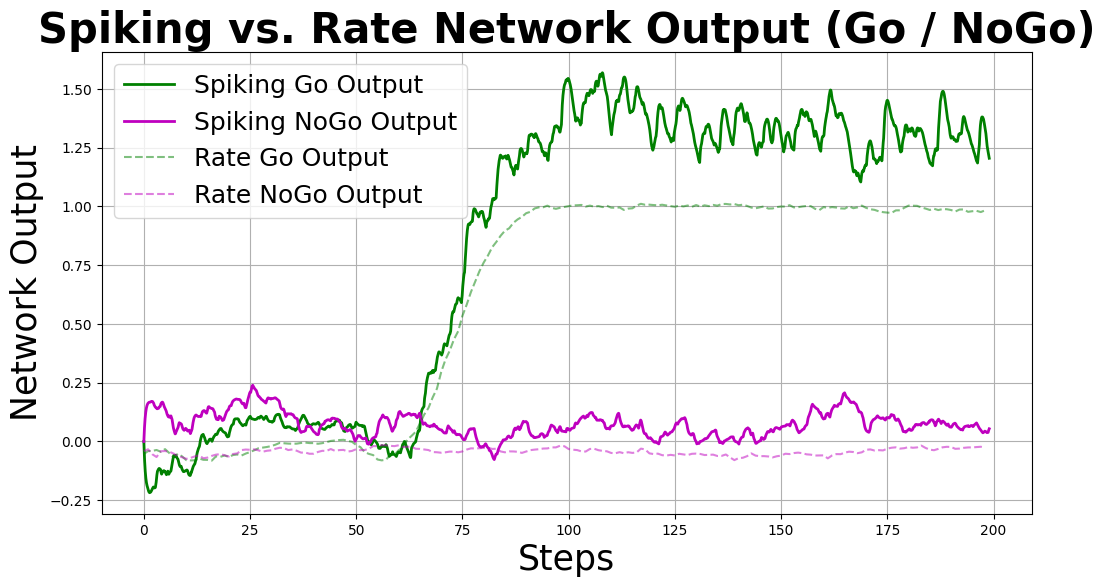
Part 4 - Evaluating the Spiking Network#
We now evaluate the performance of our spiking LIF network and compare it with the original rate-based network. We will:
Plot the network outputs for Go and NoGo trials (rate vs. spiking).
Visualize spike rasters to inspect the underlying population activity.
# Plot network output: spiking vs. rate
dt = params_go['dt']
T = params_go['T']
nt = params_go['nt']
t_spk = np.arange(dt, dt*(nt+1), dt)[:nt] * 200
# Time axis for the rate network (already in ms from Part 1/2)
time_rate = np.arange(settings['T'] - 1) * settings['DeltaT']
plt.figure(figsize=(12, 6))
# Spiking network outputs
plt.plot(t_spk, out_go.flatten(),
'g', linewidth=2, label='Spiking Go Output')
plt.plot(t_spk, out_nogo.flatten(),
'm', linewidth=2, label='Spiking NoGo Output')
# Rate network outputs
plt.plot(time_rate, go_out.cpu().numpy().flatten(),
'g--', alpha=0.5, label='Rate Go Output')
plt.plot(time_rate, nogo_out.cpu().numpy().flatten(),
'm--', alpha=0.5, label='Rate NoGo Output')
plt.xlabel('Steps', fontsize=25)
plt.ylabel('Network Output', fontsize=25)
plt.title('Spiking vs. Rate Network Output (Go / NoGo)', fontsize=30, fontweight='bold')
plt.legend(fontsize=18, loc='upper left')
plt.grid(True)
plt.show()
Spike-Raster Visualisation#
To understand how the LIF network solves the task, we plot spike rasters for Go and NoGo trials.
Red dots = excitatory neurons
Blue dots = inhibitory neurons
# Build masks for excitatory vs. inhibitory units
model_data = sio.loadmat(model_path)
inh_mask = model_data['inh'].flatten().astype(bool) # True for inhibitory
exc_mask = model_data['exc'].flatten().astype(bool) # True for excitatory
N_total = int(model_data['N'].item())
# Convenience: function to draw a raster
def plot_raster(spk_mat, title, ax):
"""
spk_mat : N x T binary spike matrix
ax : matplotlib axis
"""
for n_idx in range(N_total):
# spike times for neuron n_idx
spike_times = t_spk[spk_mat[n_idx, :] > 0]
if spike_times.size == 0: # skip if no spikes
continue
color = 'b' if inh_mask[n_idx] else 'r'
ax.plot(spike_times,
np.full_like(spike_times, n_idx),
'.', color=color, markersize=4)
ax.set_ylim(-5, N_total + 5)
ax.set_ylabel('Neuron Index', fontsize=25)
ax.set_title(title, fontsize=30, fontweight='bold')
ax.grid(True, alpha=0.3)
# Draw Go and NoGo rasters
fig, axes = plt.subplots(2, 1, figsize=(12, 10), sharex=True)
plot_raster(spk_go, 'Go Trial Spike Raster (Red = Exc, Blue = Inh)', axes[0])
plot_raster(spk_nogo, 'NoGo Trial Spike Raster (Red = Exc, Blue = Inh)', axes[1])
axes[1].set_xlabel('Steps', fontsize=25)
plt.tight_layout()
plt.show()
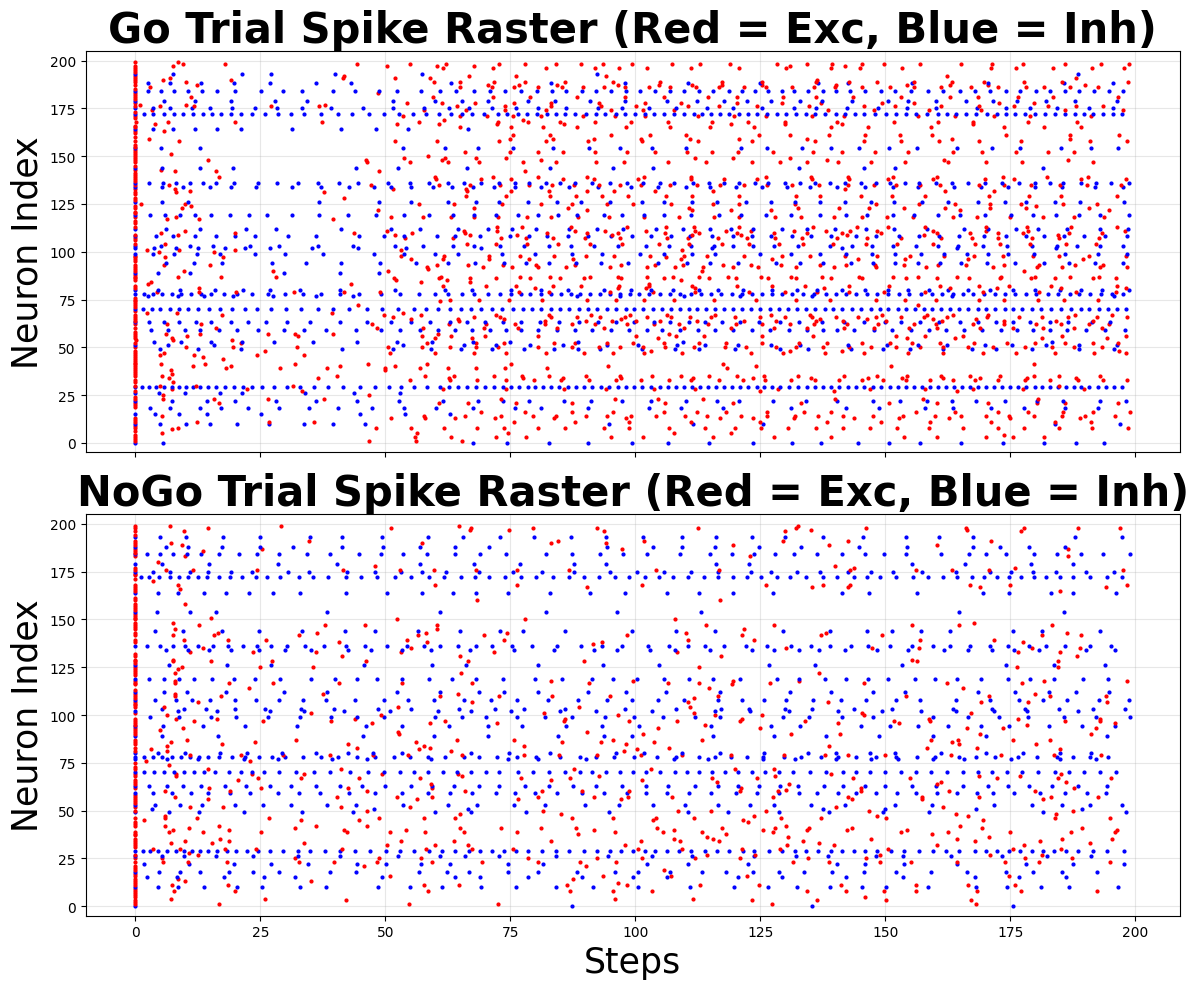
Conclusion#
The spiking LIF network reproduces the behaviour of the trained rate network on Go-NoGo trials.
Spike rasters reveal task-specific activity patterns across excitatory (red) and inhibitory (blue) populations.
You can now adapt the same workflow to other tasks (XOR, Mante, etc.) or explore different scaling factors with lambda_grid_search for further optimisation. Happy modelling!